
هوش مصنوعی و رباتیک (AI & Robotics)
ما سامانههای خودران را در مقیاس وسیع برای خودروها، رباتها و فراتر از آن توسعه داده و بهکار میگیریم. بر این باوریم که تنها رویکردی مبتنی بر هوش مصنوعی پیشرفته برای بینایی و برنامهریزی، همراه با استفاده بهینه از سختافزارهای استنتاج، میتواند به راهکاری عمومی برای رانندگی کاملاً خودکار، رباتهای دوپا و کاربردهای فراتر از آن منجر شود.
تسلا آپتیموس (Tesla Optimus)
هدف ما طراحی و ساخت یک ربات انساننمای دوپا، خودران و چندمنظوره است که توانایی انجام وظایف ناایمن، تکراری یا کسلکننده را داشته باشد. دستیابی به این هدف مستلزم توسعه پشتههای نرمافزاری است که تعادل، ناوبری، ادراک و تعامل با دنیای فیزیکی را امکانپذیر میسازند. در این مسیر، از مهندسان یادگیری عمیق، بینایی ماشین، برنامهریزی حرکت، کنترل، مهندسی مکانیک و مهندسی نرمافزار عمومی دعوت به همکاری میکنیم تا برخی از پیچیدهترین چالشهای مهندسی ما را حل کنند.
تراشه FSD
ما تراشههای اختصاصی استنتاج هوش مصنوعی را برای اجرای نرمافزار رانندگی کاملاً خودکار (Full Self-Driving) طراحی و تولید میکنیم. در این فرآیند، تمامی بهبودهای معماری و ریزمعماری—even در کوچکترین جزئیات—با هدف دستیابی به بیشینه کارایی بهازای توان مصرفی در سیلیکون لحاظ میشوند. این فعالیتها شامل طراحی چیدمان فیزیکی (Floorplanning)، تحلیل زمانبندی و توان، توسعه آزمونها و سامانههای پایش برای اطمینان از صحت عملکرد و کارایی، پیادهسازی درایورها برای برنامهریزی و ارتباط با تراشه با تمرکز بر بهینهسازی عملکرد و افزونگی، و در نهایت اعتبارسنجی تراشه سیلیکونی و آمادهسازی آن برای تولید انبوه در خودروها است.
شبکههای عصبی (Neural Networks)
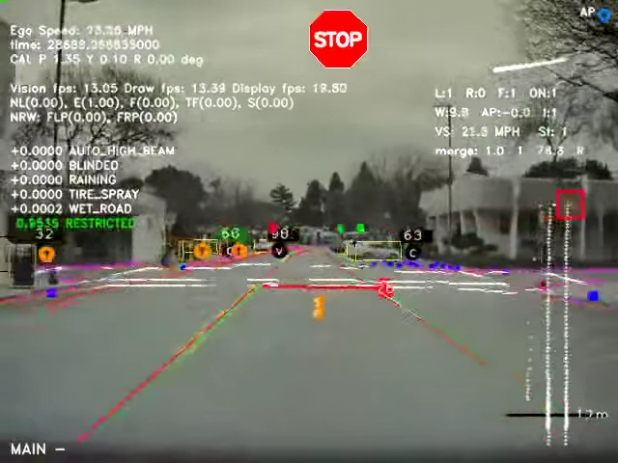
ما با بهکارگیری پژوهشهای پیشرفته، شبکههای عصبی عمیق را برای طیفی از مسائل—از ادراک تا کنترل—آموزش میدهیم. شبکههای مبتنی بر هر دوربین، تصاویر خام را تحلیل کرده و وظایفی نظیر قطعهبندی معنایی، تشخیص اشیا و برآورد عمق تکچشمی را انجام میدهند. شبکههای نمای دید پرنده (Bird’s-Eye View) با استفاده از ویدئوی تمامی دوربینها، چیدمان جاده، زیرساختهای ثابت و اشیای سهبعدی را مستقیماً در نمای بالابهپایین تولید میکنند. این شبکهها از پیچیدهترین و متنوعترین سناریوهای جهان میآموزند که بهصورت تکرارشونده و بلادرنگ از ناوگان چندمیلیونی خودروهای ما جمعآوری میشود. یک چرخه کامل آموزش شبکههای عصبی اتوپایلوت شامل ۴۸ شبکه است که برای آموزش آنها حدود ۷۰ هزار ساعت پردازش GPU مورد نیاز است. این شبکهها در مجموع، در هر گام زمانی، ۱۰۰۰ تانسور (پیشبینی) متمایز تولید میکنند.
الگوریتمهای خودران (Autonomy Algorithms)
ما الگوریتمهای هستهای هدایت خودرو را با ایجاد بازنماییای دقیق و با وضوح بالا از جهان پیرامون و برنامهریزی مسیر در آن فضا توسعه میدهیم. بهمنظور آموزش شبکههای عصبی برای پیشبینی چنین بازنماییهایی، دادههای حقیقت مبنا (Ground Truth) دقیق و در مقیاس بزرگ را بهصورت الگوریتمی و با ترکیب اطلاعات حسگرهای خودرو در بُعد فضا و زمان تولید میکنیم. با استفاده از پیشرفتهترین روشها، سامانهای مقاوم برای برنامهریزی و تصمیمگیری در شرایط پیچیده دنیای واقعی و تحت عدمقطعیت میسازیم و الگوریتمها را در مقیاس کل ناوگان تسلا ارزیابی میکنیم.
زیرساختهای کدنویسی (Code Foundations)
معیارهای اصلی ما در بهینهسازی کد شامل توان عملیاتی (Throughput)، تأخیر (Latency)، صحت عملکرد و قطعیتپذیری (Determinism) است. ما پایههای نرمافزار اتوپایلوت را از پایینترین سطوح پشته، با یکپارچگی تنگاتنگ با سختافزارهای اختصاصی، توسعه میدهیم. این فعالیتها شامل پیادهسازی بوتلودرهای فوققابلاعتماد با پشتیبانی از بهروزرسانیهای بیسیم (OTA)، راهاندازی هستههای لینوکس سفارشی، و نگارش کدهای سطح پایین سریع و بهینه از نظر مصرف حافظه برای دریافت دادههای پرتکرار و حجیم از حسگرها و اشتراکگذاری آنها میان چندین فرایند مصرفکننده—بدون ایجاد اختلال در تأخیر دسترسی به حافظه مرکزی یا محرومسازی کدهای حیاتی از چرخههای پردازشی CPU—میشود. همچنین، محاسبات را بر روی مجموعهای متنوع از واحدهای پردازشی سختافزاری، توزیعشده در چندین سیستم-روی-تراشه (SoC)، فشردهسازی و پایپلاین میکنیم.
زیرساخت ارزیابی (Evaluation Infrastructure)
ما ابزارها و زیرساختهای ارزیابی در مقیاس بزرگ، شامل سامانههای حلقهباز و حلقهبسته و همچنین سختافزار-در-حلقه (Hardware-in-the-Loop) را توسعه میدهیم تا سرعت نوآوری افزایش یابد، بهبودهای عملکردی رصد شوند و از بروز پسرفتها جلوگیری شود. در این راستا، کلیپهای شاخص و ناشناسسازیشده از ناوگان خودروها استخراج و در مجموعههای بزرگ آزمون ادغام میشوند. همچنین با توسعه کدهایی برای شبیهسازی محیط واقعی، دادههای حسگری و گرافیکهای بسیار واقعگرایانه تولید میکنیم که نرمافزار اتوپایلوت را برای اشکالزدایی زنده یا آزمونهای خودکار تغذیه میکنند.